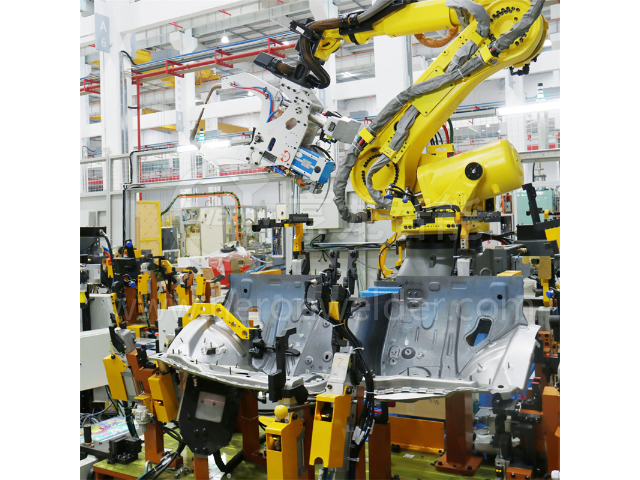
山东模块化机器人焊钳
机器人焊钳实现自动化焊接需要经过以下步骤:1.设计焊接程序:根据焊接要求和工件形状,设计出适合的焊接程序,包括焊接路径、焊接速度、焊接电流等参数。2.安装机器人焊钳:将机器人焊钳安装在焊接设备上,调整好焊接角度和位置。3.编写控制程序:编写控制程序,将焊接程序转化为机器人焊钳能够识别和执行的指令。4.进行焊接:将工件放置在焊接设备上,启动机器人焊钳进行自动化焊接。5.检测焊接质量:通过焊接质量检测设备对焊接质量进行检测,确保焊接质量符合要求。机器人焊钳实现自动化焊接具有高效、精确、稳定等优点,可以很大程度的提高焊接效率和质量,减少人工操作的繁琐和危险。机器人焊钳的速度快,能够提高生产效率和产量。山东模块化机器人焊钳

机器人焊钳的抗干扰能力是非常重要的,因为焊接过程中会受到很多干扰,如电磁干扰、机械振动、温度变化等。如果机器人焊钳的抗干扰能力不强,就会导致焊接质量不稳定,甚至出现焊接失败的情况。为了提高机器人焊钳的抗干扰能力,需要从以下几个方面进行优化:1.电磁屏蔽:在机器人焊钳的设计中,需要考虑电磁屏蔽的问题,采用合适的电磁屏蔽材料和结构,减少电磁干扰对机器人的影响。2.控制系统优化:机器人焊钳的控制系统需要进行优化,采用高精度的控制算法和传感器,提高控制精度和稳定性,减少机械振动对焊接质量的影响。3.温度控制:焊接过程中温度的变化会对焊接质量产生影响,因此需要采用合适的温度控制技术,保持焊接区域的稳定温度,提高焊接质量。4.故障检测:机器人焊钳需要具备故障检测和自动修复的功能,及时发现和处理故障,保证焊接过程的稳定性和可靠性。综上所述,机器人焊钳的抗干扰能力是非常重要的,需要从多个方面进行优化,提高机器人焊钳的稳定性和可靠性,保证焊接质量的稳定和一致性。石家庄点焊机器人焊钳厂家机器人焊钳具有高度的灵活性和可编程性,能够适应不同的焊接需求。

机器人焊钳的焊接速度是可以调节的。焊接速度是指焊接过程中焊接头的移动速度,它直接影响到焊接质量和效率。机器人焊钳的焊接速度可以通过控制焊接机器人的运动速度来实现。在焊接过程中,可以通过调整机器人的运动速度来控制焊接速度,以达到更佳的焊接效果。同时,还可以通过调整焊接电流和电压等参数来进一步控制焊接速度和焊接质量。不同的焊接任务需要不同的焊接速度,因此在实际应用中需要根据具体情况进行调节。总之,机器人焊钳的焊接速度是可以调节的,通过合理的调节可以实现高效、高质量的焊接。
机器人焊钳在焊接时的热影响区是指焊接过程中受到热影响的区域。这个区域通常是焊接接头周围的一定范围内,包括焊接接头、母材和热影响区。焊接时,焊钳会产生高温,使接头和母材局部熔化,形成焊缝。同时,高温也会对接头周围的母材产生热影响,使其发生物理和化学变化,从而影响接头的性能。热影响区的大小和形状取决于焊接过程中的热输入、焊接速度、焊接材料和焊接参数等因素。一般来说,焊接速度越快,热影响区越小;热输入越大,热影响区越大。热影响区的存在对焊接接头的性能有着重要的影响。如果热影响区过大,会导致接头的硬度、韧性和耐腐蚀性等性能下降,从而影响焊接接头的质量。因此,在焊接过程中,需要通过控制焊接参数和焊接速度等措施来减小热影响区的大小,以保证焊接接头的质量。机器人焊钳可以适用于各种不同的焊接材料和焊接方式,具有广泛的应用领域。
机器人焊钳的使用对员工的工作环境和安全有着显着的影响。首先,机器人焊钳的使用可以减少员工的劳动强度,降低了员工的体力消耗和劳动强度,从而提高了员工的工作效率和生产效益。其次,机器人焊钳的使用可以减少员工的工作风险,降低了员工在焊接过程中的受伤风险,从而提高了员工的安全保障和健康水平。此外,机器人焊钳的使用还可以减少员工的工作压力,提高员工的工作满意度和工作积极性,从而提高了员工的工作质量和生产效率。总之,机器人焊钳的使用对员工的工作环境和安全有着积极的影响,可以提高员工的工作效率和生产效益,同时也可以保障员工的安全和健康。机器人焊钳是一种高效、精确的焊接工具,能够在短时间内完成复杂的焊接任务。模块化机器人焊钳品牌排行
机器人焊钳的使用能够提高生产线的稳定性和连续性,减少生产中断。山东模块化机器人焊钳
机器人焊钳在使用过程中需要注意以下安全问题:1.机器人操作区域应该有明确的标识,禁止未经授权的人员进入。2.操作人员应该接受专业的培训,了解机器人的操作方法和安全规范。3.机器人应该安装在稳定的基础上,避免机器人在操作过程中发生倾斜或移动。4.机器人应该配备安全装置,如安全光幕、安全门等,以保证操作人员的安全。5.在操作机器人时,应该戴上防护手套、护目镜等个人防护装备,以避免受到火花、烟尘等伤害。6.机器人的电源应该随时关闭,以避免电击等安全事故。7.在机器人操作过程中,应该随时检查机器人的状态,如电源、传感器等,确保机器人正常运行。8.在机器人操作过程中,应该避免与机器人的工作区域接触,以避免受到机器人的碰撞或夹伤。9.在机器人操作过程中,应该避免机器人与其他设备或人员发生碰撞,以避免安全事故的发生。10.在机器人操作过程中,应该随时注意机器人的工作状态,如温度、电流等,以避免机器人发生故障或损坏。山东模块化机器人焊钳
上一篇: 重庆智能机器人焊钳供应商
下一篇: 河北汽车零部件机器人焊钳费用