河北工业机器人焊钳公司
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。机器人焊钳具有灵活性强、适应性广的特点,能够适应不同形状、大小的工件。河北工业机器人焊钳公司
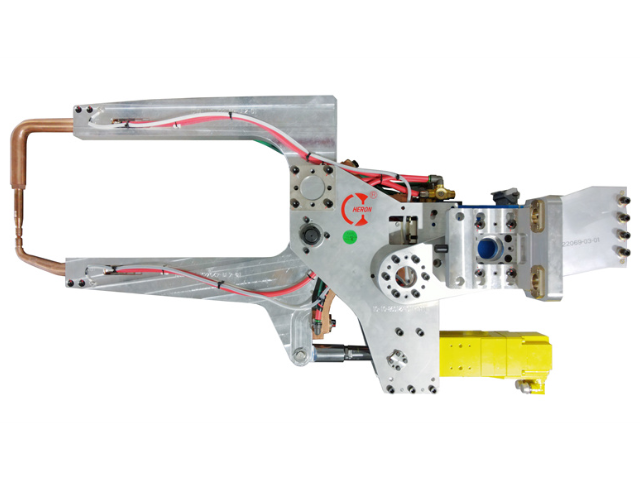
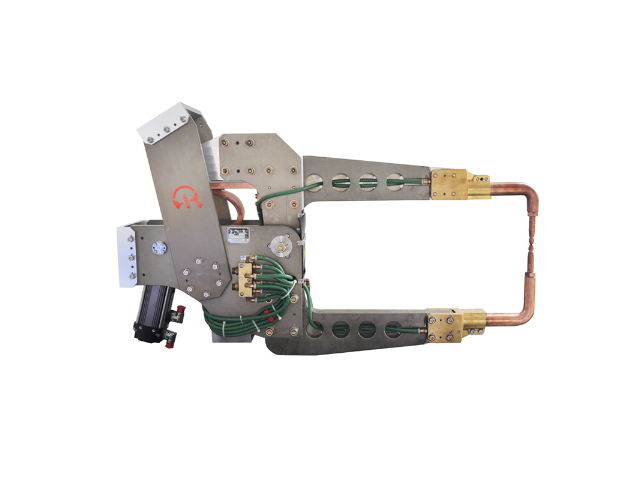
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。四川专业机器人焊钳电路图机器人焊钳采用先进的自动化技术,能够实现高质量的焊接效果。
机器人焊钳的操作难度可以从以下几个方面进行评估:1.技术难度:机器人焊钳需要掌握多种技术,如机器人编程、焊接技术、传感器技术等,这些技术的掌握难度较高,需要专业的技术人员进行操作。2.系统难度:机器人焊钳需要整合多个系统,如机器人系统、焊接系统、控制系统等,这些系统的整合难度较高,需要专业的系统集成人员进行操作。3.环境难度:机器人焊钳需要在特定的环境下进行操作,如高温、高压、有害气体等环境,这些环境的操作难度较高,需要专业的操作人员进行操作。4.安全难度:机器人焊钳需要遵守严格的安全规定,如防止机器人碰撞、防止电击等,这些安全规定的遵守难度较高,需要专业的安全人员进行操作。综上所述,机器人焊钳的操作难度较高,需要专业的技术人员、系统集成人员、操作人员和安全人员进行操作,同时需要严格遵守相关的技术、系统、环境和安全规定。
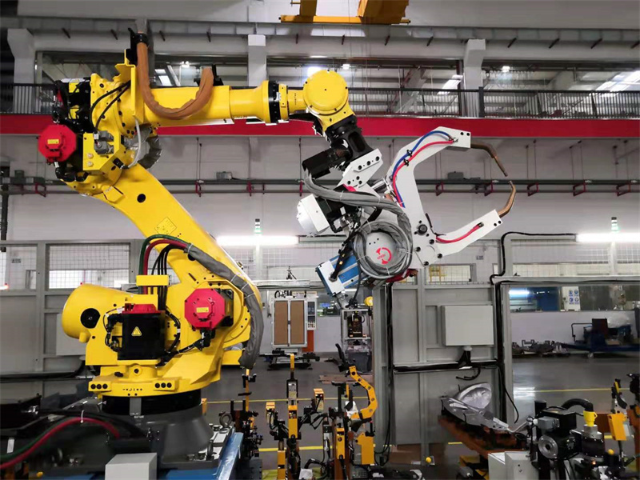
焊接机器人是通过人工智能技术、传感技术、通信技术等制造出来的用于自动化焊接作业的机械设备,具有效率高、成本低、生产周期明确、自动化水平高、产品质量稳定等特点,广泛应用于工程机械制造、汽车及汽车零部件制造、煤矿行业、市政施工、石油天然气管道、船舶制造等领域,以提高产品竞争力,保障用户的生产效益。焊接机器人在焊接过程中不需要人为参与,对工件进行自动焊接的机械设备,可以用来代替传统焊接,在焊接过程中可以实现稳定焊接,提高焊接生产线的速度,焊接机器人和传统焊接较大的区别就是它的智能控制控制系统。机器人焊钳采用先进的自动化技术,能够实现高速、高精度的焊接操作。
机器人焊钳的焊接效率可以通过以下几个方面来提高:1.优化焊接程序:通过优化焊接程序,可以使机器人焊钳的焊接速度更快、更稳定。例如,可以调整焊接速度、电流、电压等参数,以达到更佳的焊接效果。2.提高机器人的精度:机器人的精度越高,焊接的准确性就越高,从而可以提高焊接效率。可以通过更换更精确的传感器、提高机器人的控制精度等方式来提高机器人的精度。3.优化工作环境:机器人焊钳的工作环境对其焊接效率也有很大的影响。例如,可以优化焊接工作区域的照明、通风等条件,以提高机器人的工作效率。4.使用更高效的焊接设备:使用更高效的焊接设备可以提高机器人焊钳的焊接效率。例如,可以使用更高功率的焊接机、更快速的焊接头等设备,以提高焊接速度和效率。5.优化焊接材料:选择更适合机器人焊钳的焊接材料,可以提高焊接效率。例如,可以选择更容易焊接的材料,或者使用更高效的焊接材料,以提高焊接效率。机器人焊钳的控制系统稳定可靠,能够保证设备的长期稳定运行。四川专业机器人焊钳电路图
机器人焊钳的应用范围广阔,可以用于汽车等多个领域。河北工业机器人焊钳公司
焊接机器人的结构组成:1、机器人本体:焊接机器人的机器人本体是由伺服电机驱动,六个关节进行协调运动,提高了焊接的灵活度,精确地保证机械手的运动精度以及运动轨迹。2、焊接电源:焊接机器人需要具备单独的电源,这样设备启动的时候不会出现电压电流负荷的情况,保护全自动焊接机器人本体不受损害。3、控制系统。控制系统是焊接机器人的重要组成部分,相当于人类的大脑,可以发出控制指令,控制柜中具备输入和输出功能,现阶段焊接市场中的焊接机器人采用的是离线编程,操作人员需要将编程程序以及辅助设备程序输入到控制系统中。河北工业机器人焊钳公司
上一篇: 广州灯盘逆变焊机报价
下一篇: 武汉滚点缝焊机怎么样