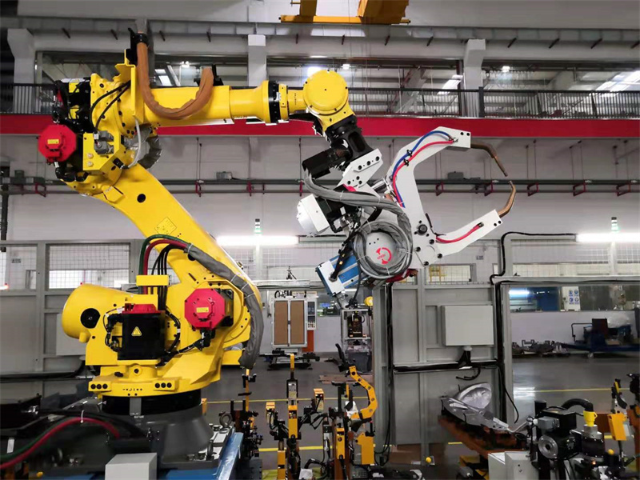
河南全自动机器人焊钳电路图
机器人焊钳的基本原理是通过机器人控制系统控制焊钳的运动,实现对工件进行焊接。机器人焊钳主要由机器人控制系统、焊钳、焊接电源、传感器等组成。机器人控制系统是机器人焊钳的主要部分,它通过控制机器人的运动轨迹和焊钳的动作,实现对工件的精确焊接。焊钳是机器人焊接的工具,它可以根据需要进行开合、旋转等动作,以适应不同的焊接需求。焊接电源是机器人焊接的能源,它提供焊接所需的电能和热能。传感器可以检测焊接过程中的温度、电流、电压等参数,以保证焊接质量。机器人焊钳的工作流程一般包括以下几个步骤:首先,机器人控制系统会根据焊接任务的要求,确定焊接路径和焊接参数。然后,焊钳会根据路径和参数进行动作,将焊接电源提供的电能和热能传递到工件上,完成焊接过程。除此之外,传感器会对焊接质量进行检测和监控,以确保焊接质量符合要求。机器人焊钳的优点是可以实现高精度、高效率的焊接,可以适应不同的焊接需求,同时还可以减少人工操作的风险和劳动强度。因此,在现代制造业中,机器人焊钳已经成为一种重要的焊接工具。机器人焊钳采用先进的自动化技术,能够实现高质量的焊接效果。河南全自动机器人焊钳电路图
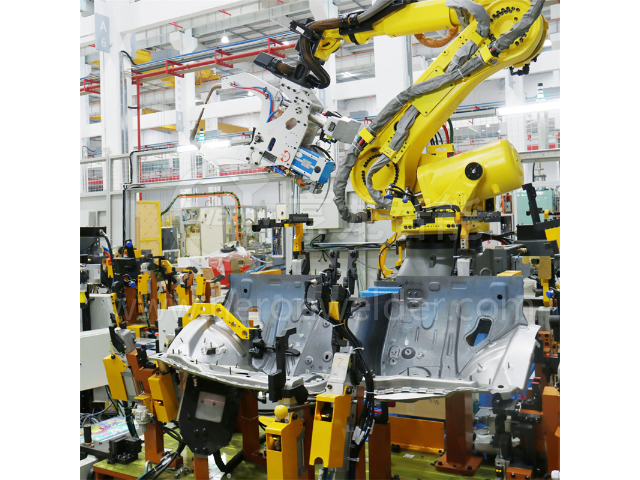
机器人焊钳的移动速度和焊接速度可以调整,这是因为机器人焊钳的控制系统可以通过编程来控制其运动和焊接速度。在焊接过程中,机器人焊钳需要根据焊接工艺要求和焊接材料的特性来调整其移动速度和焊接速度,以确保焊接质量和效率。移动速度是指机器人焊钳在焊接过程中移动的速度,它的调整可以影响焊接速度和焊接质量。如果移动速度过快,可能会导致焊接质量不稳定或者焊接缺陷;如果移动速度过慢,可能会影响焊接效率。因此,机器人焊钳的移动速度需要根据具体情况进行调整。焊接速度是指机器人焊钳在焊接过程中的焊接速度,它的调整可以影响焊接质量和焊接效率。如果焊接速度过快,可能会导致焊接质量不稳定或者焊接缺陷;如果焊接速度过慢,可能会影响焊接效率。因此,机器人焊钳的焊接速度需要根据具体情况进行调整。总之,机器人焊钳的移动速度和焊接速度可以调整,需要根据具体情况进行调整,以确保焊接质量和效率。杭州汽车车身机器人焊钳电路图机器人焊钳的应用范围广阔,可以用于汽车等多个领域。
机器人焊钳的工作原理是通过控制系统控制机器人的运动,使其按照预定的路径和速度进行运动,同时通过传感器感知焊接过程中的温度、电流、电压等参数,实现焊接的自动化。具体来说,机器人焊钳的工作原理包括以下几个方面:1.控制系统:机器人焊钳的控制系统包括硬件和软件两部分,硬件包括电机、传感器、控制器等,软件包括程序和算法。控制系统可以实现机器人的运动控制、焊接参数的控制和监测等功能。2.机械结构:机器人焊钳的机械结构包括机械臂、焊钳、传动系统等,机械臂可以实现多自由度的运动,焊钳可以实现焊接操作,传动系统可以将电机的转动转化为机械臂的运动。3.传感器:机器人焊钳的传感器可以感知焊接过程中的温度、电流、电压等参数,通过传感器的反馈,控制系统可以实时调整焊接参数,保证焊接质量。4.焊接参数:机器人焊钳的焊接参数包括焊接电流、电压、速度、焊接时间等,这些参数可以根据焊接材料和焊接要求进行调整,以保证焊接质量。综上所述,机器人焊钳的工作原理是通过控制系统控制机器人的运动和焊接参数,实现焊接的自动化。机器人焊钳具有高效、精确、稳定的特点,可以提高焊接效率和质量。
机器人焊钳常见的故障有以下几种:1.焊钳夹紧不牢:可能是夹紧力度不够,需要调整夹紧力度;也可能是夹紧机构损坏,需要更换夹紧机构。2.焊钳夹紧不平衡:可能是夹紧机构不平衡,需要调整夹紧机构;也可能是夹紧机构损坏,需要更换夹紧机构。3.焊钳夹紧后松动:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度不够,需要调整夹紧力度。4.焊钳夹紧后无法松开:可能是夹紧机构损坏,需要更换夹紧机构;也可能是夹紧力度过大,需要调整夹紧力度。5.焊钳夹紧机构卡死:可能是机构内部零件损坏,需要更换零件;也可能是机构内部积尘过多,需要清洗维护。解决这些故障的方法包括:调整夹紧力度、更换夹紧机构、更换零件、清洗维护等。同时,对机器人焊钳进行定期维护和保养,可以有效预防故障的发生。机器人焊钳的维护成本低,能够降低企业的运营成本。

机器人焊钳是工业生产中常用的设备,它的维护和保养对于保证设备的正常运行和延长设备寿命至关重要。以下是机器人焊钳维护和保养需要注意的事项:1.定期清洁:机器人焊钳在使用过程中会积累灰尘和污垢,定期清洁可以保证设备的正常运行。清洁时应注意不要使用含有酸碱成分的清洁剂,以免损坏设备。2.润滑:机器人焊钳的运动部件需要定期润滑,以减少磨损和摩擦。润滑时应使用适当的润滑油或润滑脂。3.检查电气连接:机器人焊钳的电气连接应定期检查,确保连接牢固,避免电气故障。4.检查气路连接:机器人焊钳的气路连接也需要定期检查,确保气路畅通,避免气路故障。5.定期更换易损件:机器人焊钳的易损件如焊钳、电极等需要定期更换,以保证设备的正常运行。6.定期校准:机器人焊钳的校准也需要定期进行,以确保设备的精度和稳定性。总之,机器人焊钳的维护和保养需要定期进行,细心认真地进行维护和保养可以延长设备的寿命,提高设备的使用效率。机器人焊钳的维护保养简单方便,能够减少设备故障和停机时间。深圳模块化机器人焊钳公司
机器人焊钳的操作过程中,能够实现实时监控和调整,保证焊接质量。河南全自动机器人焊钳电路图
焊接机器人的结构组成:1、机器人本体:焊接机器人的机器人本体是由伺服电机驱动,六个关节进行协调运动,提高了焊接的灵活度,精确地保证机械手的运动精度以及运动轨迹。2、焊接电源:焊接机器人需要具备单独的电源,这样设备启动的时候不会出现电压电流负荷的情况,保护全自动焊接机器人本体不受损害。3、控制系统。控制系统是焊接机器人的重要组成部分,相当于人类的大脑,可以发出控制指令,控制柜中具备输入和输出功能,现阶段焊接市场中的焊接机器人采用的是离线编程,操作人员需要将编程程序以及辅助设备程序输入到控制系统中。河南全自动机器人焊钳电路图
上一篇: 辽宁直缝缝焊机工厂
下一篇: 辽宁多功能储能焊机哪家好