西安专业机器人焊钳供应商
机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定。一般来说,焊接参数包括焊接电流、电压、焊接速度、焊接时间、焊接角度等。首先,焊接电流和电压是影响焊接质量的关键参数,需要根据焊接材料的种类、厚度、焊接位置等因素来确定。一般来说,焊接电流和电压需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整。其次,焊接速度和焊接时间也是影响焊接质量的重要参数。焊接速度需要根据焊接材料的熔点、热导率、热膨胀系数等因素来进行调整,而焊接时间则需要根据焊接材料的厚度、焊接位置等因素来进行调整。除此之外,焊接角度也是影响焊接质量的重要因素。焊接角度需要根据焊接材料的形状、焊接位置等因素来进行调整,以确保焊接质量和焊接强度。总之,机器人焊钳的焊接参数设置需要根据具体的焊接工艺和焊接材料来确定,需要进行多次试验和调整,以确保焊接质量和焊接强度。机器人焊钳具有灵活性强、适应性广的特点,能够适应不同形状、大小的工件。西安专业机器人焊钳供应商
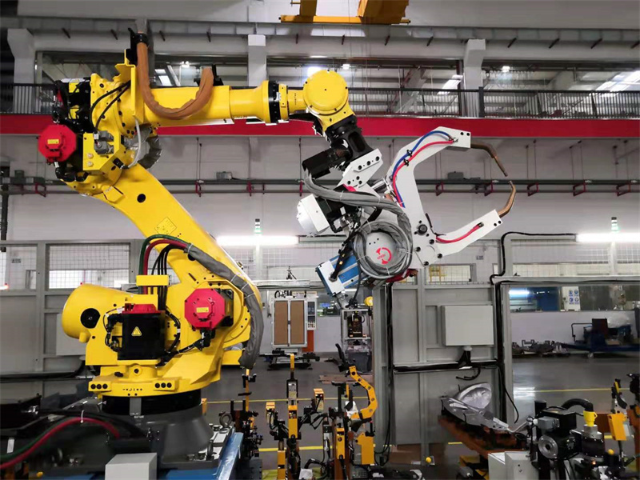
机器人焊钳是一种自动化焊接设备,广泛应用于各种焊接领域。以下是机器人焊钳的几个主要应用领域:1.汽车制造:机器人焊钳在汽车制造中应用广阔,主要用于车身焊接、车门焊接、车轮焊接等。2.电子制造:机器人焊钳在电子制造中也有应用,主要用于电子元器件的焊接,如电路板、电子器件等。3.金属制造:机器人焊钳在金属制造中也有广泛应用,主要用于焊接各种金属制品,如钢结构、铝合金、铜制品等。总之,机器人焊钳在各个领域都有广泛的应用,可以提高生产效率、降低成本、提高产品质量。安徽专业机器人焊钳价格机器人焊钳的速度快,能够提高生产效率和产量。
机器人焊钳的焊接速度是可以调节的。焊接速度是指焊接过程中焊接头的移动速度,它直接影响到焊接质量和效率。机器人焊钳的焊接速度可以通过控制焊接机器人的运动速度来实现。在焊接过程中,可以通过调整机器人的运动速度来控制焊接速度,以达到更佳的焊接效果。同时,还可以通过调整焊接电流和电压等参数来进一步控制焊接速度和焊接质量。不同的焊接任务需要不同的焊接速度,因此在实际应用中需要根据具体情况进行调节。总之,机器人焊钳的焊接速度是可以调节的,通过合理的调节可以实现高效、高质量的焊接。
机器人焊钳是工业生产中常用的设备,它的维护和保养对于保证设备的正常运行和延长设备寿命至关重要。以下是机器人焊钳维护和保养需要注意的事项:1.定期清洁:机器人焊钳在使用过程中会积累灰尘和污垢,定期清洁可以保证设备的正常运行。清洁时应注意不要使用含有酸碱成分的清洁剂,以免损坏设备。2.润滑:机器人焊钳的运动部件需要定期润滑,以减少磨损和摩擦。润滑时应使用适当的润滑油或润滑脂。3.检查电气连接:机器人焊钳的电气连接应定期检查,确保连接牢固,避免电气故障。4.检查气路连接:机器人焊钳的气路连接也需要定期检查,确保气路畅通,避免气路故障。5.定期更换易损件:机器人焊钳的易损件如焊钳、电极等需要定期更换,以保证设备的正常运行。6.定期校准:机器人焊钳的校准也需要定期进行,以确保设备的精度和稳定性。总之,机器人焊钳的维护和保养需要定期进行,细心认真地进行维护和保养可以延长设备的寿命,提高设备的使用效率。机器人焊钳的精度高,能够保证焊接质量和产品稳定性。
机器人焊钳的焊接效率可以通过以下几个方面来提高:1.优化焊接程序:通过优化焊接程序,可以使机器人焊钳的焊接速度更快、更稳定。例如,可以调整焊接速度、电流、电压等参数,以达到更佳的焊接效果。2.提高机器人的精度:机器人的精度越高,焊接的准确性就越高,从而可以提高焊接效率。可以通过更换更精确的传感器、提高机器人的控制精度等方式来提高机器人的精度。3.优化工作环境:机器人焊钳的工作环境对其焊接效率也有很大的影响。例如,可以优化焊接工作区域的照明、通风等条件,以提高机器人的工作效率。4.使用更高效的焊接设备:使用更高效的焊接设备可以提高机器人焊钳的焊接效率。例如,可以使用更高功率的焊接机、更快速的焊接头等设备,以提高焊接速度和效率。5.优化焊接材料:选择更适合机器人焊钳的焊接材料,可以提高焊接效率。例如,可以选择更容易焊接的材料,或者使用更高效的焊接材料,以提高焊接效率。机器人焊钳的使用能够减少工人的劳动强度,提高工作安全性。重庆全自动机器人焊钳品牌排行
机器人焊钳的操作简单,能够降低人员培训成本和时间。西安专业机器人焊钳供应商
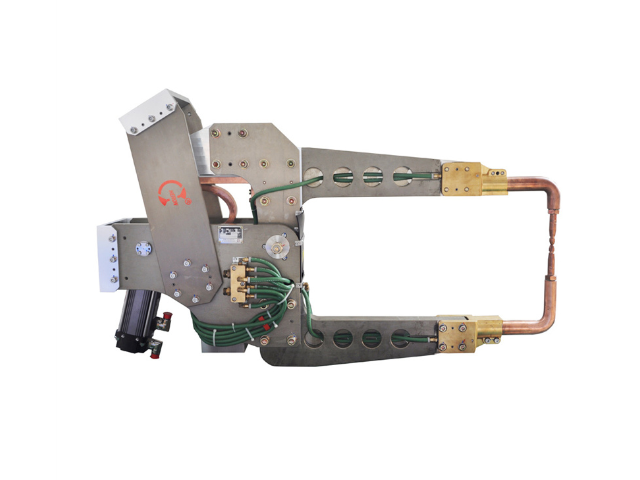
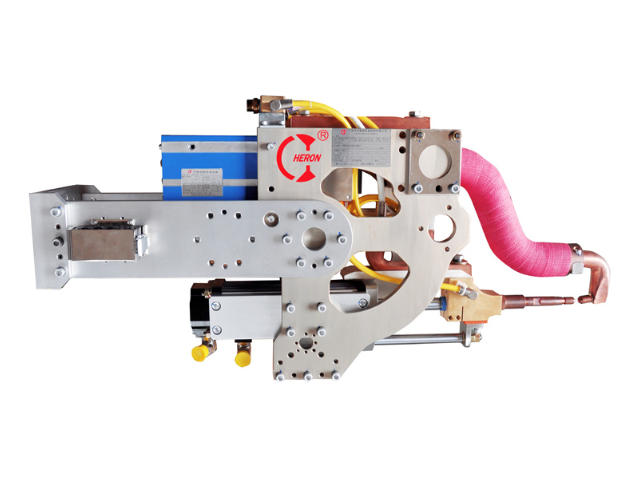
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。西安专业机器人焊钳供应商
上一篇: 苏州耐用缝焊机公司
下一篇: 湖南大功率储能焊机设备