河北工业机器人打磨抛光厂商
新型高效环保无尘的抛光机,包括有机架,机架上设有工位切换机构,工位切换机构上设有三组旋转机构,机架旋转机构的移动路径形成DIYI加工工位、第二加工工位与装卸工位,旋转机构上设有夹具,夹具通过旋转机构做公转和自转动作,DIYI加工工位与第二加工工位下方设有两个抛光桶,抛光桶内有适合产品加工的磨料,底部设有桶升降机构配合产品打磨生产需要,采用上述方案使夹具上产品通过抛光桶进行无死角抛光,提升抛光精度避免飞尘,通过设置装卸工位,使抛光过程中能装卸产品,提高生产效率,通过设置桶升降机构,使抛光时不需要升降旋转机构,避免了升降旋转机构时,由于旋转机构过重,长久升降时精度不准需要经常调校与驱动力过大消耗能源过高的问题。浙江珂斯顿机器人科技有限公司致力于提供机器人打磨抛光,有想法的不要错过哦!河北工业机器人打磨抛光厂商
轨道打磨加工流水线,包括柔性打磨机器人与轨道检测夹具,轨道检测夹具上设有焊缝检测机构与轨道夹持机构,柔性打磨机器人包括有工业机器人以及柔性打磨装置,柔性打磨装置包括连接头、驱动电机、活动支架、砂带轮组件以及设置在砂带轮组件与传动轮,驱动电机的输出端穿过活动支架后设置驱动轮,并通过驱动轮带动传动轮驱动两端的砂带轮组件运作,连接头设有柔性打磨空间,活动支架通过驱动电机固定在柔性打磨空间内,并在柔性打磨空间内以驱动电机为支点左右摆动,轨道检测夹具通过焊缝检测机构检测到焊缝后通过轨道夹持机构将带有焊缝的轨道停留在柔性打磨机器人的打磨区域内。浙江五金工具机器人打磨抛光多少钱浙江珂斯顿机器人科技有限公司为您提供机器人打磨抛光,有想法的不要错过哦!

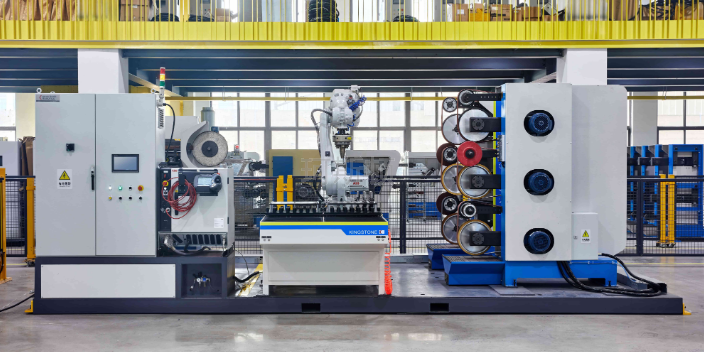
机器人自动抛光系统由一台工业机器人实现全自动控制、可重复编辑、能在三维空间里完成各种抛光作业。机器人手抓车载承重力50-80KG,臂长1900~2150mm。抛光机具有多个可用磨削接触轮,在磨削过程中,机器人可控制砂带转速,自动调整砂带的张紧力,自动选择当前可用接触轮。在中国众多的制造企业,因为技术与设备水平的制约,以及前些年廉价劳动力市场的引导,众多企业优先采用人工参与的半自动或者手动抛光方式。按照本次事故伤亡人数推断,该工厂车间很有可能采用的是全人工方式的手动抛光——即分为若干小组在同一车间进行抛光作业,每人手持一架手提式抛光机进行对铝合金轮毂的抛光作业,抛光蜡打蜡、轮毂的搬运均由人工完成。
整个抛光机器人被密封在机房内,抛光过程产生的废物污染,可以有效清理和控制,不会污染环境或影响操作人员健康。机器人抛光系统在复杂形面工件的精加工领域,具有不可替代的优势。机器人抛光机具有自动位置补偿功能,在磨削过程中,可自动探测抛光轮的磨损情况,自动调整抛光轮的位置,从而补偿抛光轮磨损带来的位置误差。抛光机具有砂带断裂报警功能,有效杜绝砂带断裂后机器人空运转带来的危险与时间的浪费。新型机器人柔性抛光系统将具有力补偿的抛光机与机器人、传感器、控制器组成智能制造系统。在进行复杂曲面工件抛光加工时比普通机械式抛光加工和手工抛光更能保证加工工件表面质量,加工出来的产品具备高度的质量一致性,而且加工效率提高。浙江珂斯顿机器人科技有限公司机器人打磨抛光值得用户放心。
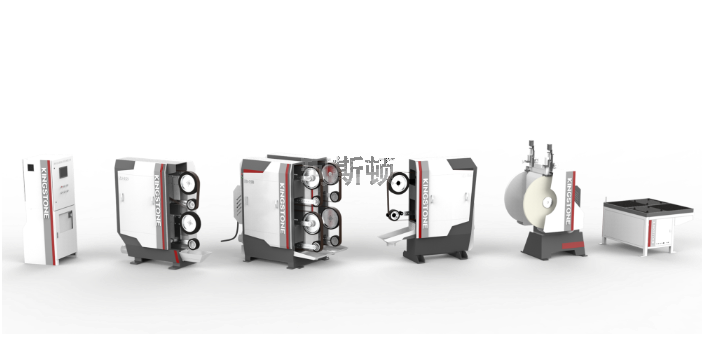
汽车装饰条打磨抛光生产线包括工业机器人、旋转放料台、砂带机与清光机,旋转放料台通过可移动的放料板与可调宽幅的沟槽,从而适配不同车型与厚度的装饰条,通过旋转机构,使工人上下料均不需要进入工业机器人工作区域内,保障工人生产安全,提升生产效率,在放料台上设置复检机构,对不符合规格的装饰条进行剔除,该生产线的清光机上通过多组清光机构对装饰条精细抛光,通过浮动抛光组件避免装饰条过度抛光,通过夹持手轮与横向调节组件,便捷调节固体蜡与布轮之间的间隙,该砂带机通过砂带涂料机构自动带砂带进行涂抹肥皂,提高砂带寿命,通过多组砂带机构对装饰条精细打磨,通过浮动打磨组件避免装饰条过度打磨。浙江珂斯顿机器人科技有限公司致力于提供机器人打磨抛光,有需要可以联系我司哦!温州门把手机器人打磨抛光打磨
机器人打磨抛光,就选浙江珂斯顿机器人科技有限公司,让您满意,有想法可以来我司咨询!河北工业机器人打磨抛光厂商
伴随着国内汽车零部件和工业产品加工企业及五金等行业企业对抛光打磨机器人需求量的增长,近年来国内抛光打磨机器人安装量呈现快速增长态势。近年来,随着工业自动化需求的不断释放以及人口红利的不断下降,我国机器人产业迎来了快速发展。2013年以来,国内工业机器人市场在需求和应用的双重拉动下,进入到飞速发展期,不仅市场销量超过全球三分之一,而且年均增长率也长期维持在两位数以上。截至目前,中国已连续八年成为全球z大的工业机器人需求和应用市场。河北工业机器人打磨抛光厂商
上一篇: 吉林椅子脚机器人打磨抛光哪里好
下一篇: 四川水龙头机器人打磨抛光