舟山自动化机械手哪家好
桁架机械手是数控车床自动上下料、卸料的自动化机械装置,其自动上下料基本工作原理是按照预先编写好的程序的指令,从料仓中将工件一个个抓取并移动到车床主轴上。工件卸入成品料仓,机械臂上附有一组转塔式双工位夹具,一组夹具负责上料,另一组夹具负责卸料。总之,机械手以自动装卸作业代替人工智能作业,从而提高效率,降低成本,增强企业竞争力。桁架机械手选型参数购买桁架机械手时,要了解桁架机械手的机械使用要求,如所实现的功能、负载重量、精度和夹持方式等,全部基于机器条件。机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。舟山自动化机械手哪家好

桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。浙江六轴机械手供应厂浙江勃展工业自动化设备有限公司为您提供桁架机械手设备。

桁架机械手动作原理?由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。由于桁架机械手输送的速度快、加速度大、加减速时间短,当输送较重的工件时,由于惯量大,伺服驱动电机要有足够的驱动和制动的能力,支撑元件也要有足够的刚度及强度。只有这样,才能使伺服电动机满足桁架机械手输送的高响应、高刚度及高精度要求。
桁架机械手焊接四大条件介绍。数控桁架机械手对整体尺寸精度没有特别高的要求。配备偏差检测和焊接过程电弧跟踪功能可进行一定程度的修正2、应控制角焊缝装配间隙。否则,焊缝很容易穿透。如果有缝隙,在机器人焊接前进行人工打底,可以有效减少焊透的发生。对接焊缝根部间隙应稳定均匀。现代焊接机器人通常具有间隙感应能力。在一定程度上可以根据焊缝的实际根部间隙进行参数修正,但如果间隙过于不均匀,变异性大,焊缝的熔合和焊缝成型质量也会很不稳定。应控制机械手焊缝余量。比如一个角焊缝应该是10,而实际板边焊缝余量只有8,肯定会咬边桁架机械手改变了传统车间内的工作方式,改善了工作环境,提高了劳动生产力。
浅谈机械手臂的作用组成介绍机械手臂是机械人技术领域中得到***实际应用的自动化机械装置,在工业制造、医学***、娱乐服务、***、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精.确地定位到三维(或二维)空间上的某一点进行作业。机械手臂根据结构形式的不同分为多关节机械手臂,直角坐标系机械手臂,球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。常见的六自由度机械手臂。他有X移动,Y移动,Z移动,X转动,Y转动,Z转动六个自由度组成。浙江勃展工业自动化设备有限公司是一家专业提供机械手设备的公司。舟山非标机械手供应厂
桁架机械手的发展历程可以分为三个阶段。舟山自动化机械手哪家好
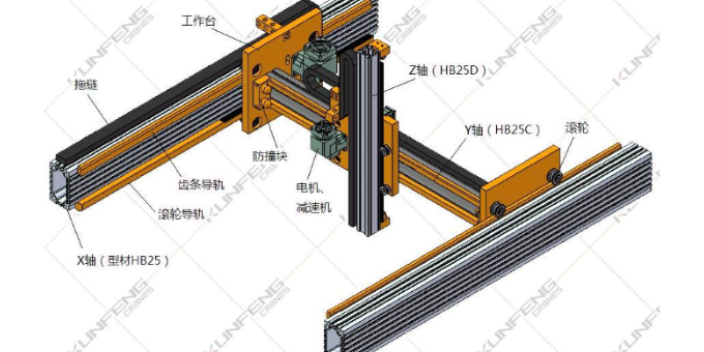
桁架机械手的控制**通过工业控制器(如:PLC,实现运动控制、单片机等。).通过控制器对各种输入(各种传感器、按钮等)的信号进行分析和处理。),在做出一定的逻辑判断后,向各输出元件(继电器、电机驱动器、指示灯等。)发出执行命令并完成X,Y,Z三轴之间的联合运动实现了一套完整的自动操作过程。在国内机械加工中,许多是使用**机器或人工机床,但随着社会的进步和发展,技术、产品升级、**机器和劳动力、面积大、灵活性不足、生存效率低等不能满足大规模生产的需要。舟山自动化机械手哪家好
上一篇: 嘉兴六轴机械手直销
下一篇: 金华关节机械手机器人