工业机械手直销
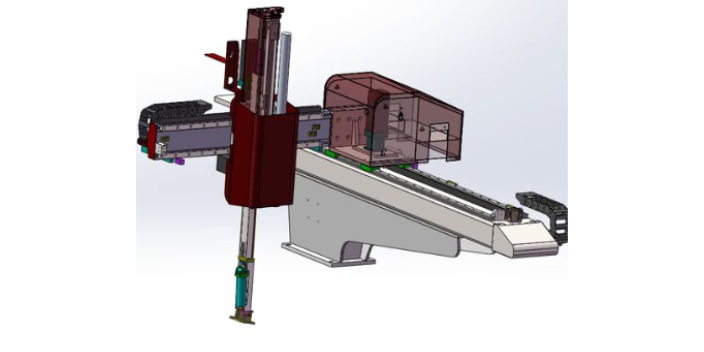
桁架机械手组成结构和原理。桁架机械手主要完成机床制造过程的全自动化,采用集成加工技术,适用于生产线上下料、工件旋转、工件排序等。数控桁架机械手由机体、驱动系统和控制系统三个基本部分组成。根据重型桁架机械手制造商的说法,机器人的结构将其分类为笛卡尔坐标系,机械手沿二维笛卡尔坐标系移动。主要部分通常采用龙门式结构,由Y向横梁和导轨、Z向滑枕、十字滑台、立柱、过渡连接板和底座组成,齿轮随Y向横梁和固定齿条转动。z方向的滑枕带动运动部件沿导轨快速运动。桁架机械手的发展历程可以分为三个阶段。工业机械手直销
有关桁架机械手的设计?在工业生产中,锌热喷涂工艺常用于工件的防腐处理。但是在喷锌过程中,锌粉对工人是非常危险和有害的,设计的自动喷锌机械手帮助客户解决了在各种工件上喷锌的问题。标配除尘装置,剩余工件用行走小车放在固定支架上,用龙门式喷锌机械手对工件喷锌。总体方案和布局整体方案主要由框架体、地轨、下行走机构、上行走机构、侧行走机构、垂直行走机构、下回转机构、喷锌机构、电控系统、除尘装置组成。设备运动平稳,喷涂均匀。工作流程1、用吊车装卸工件,将工件移动到位置;2、龙门喷涂机械手联动,喷枪由喷锌台车带动工件轴向移动进行喷锌;3、除尘器吸收剩余的锌粉;4、喷锌完成后,吊车带动工件。温州全自动机械手浙江勃展工业自动化设备有限公司为您提供 机械手设备,欢迎您的来电哦!

机械手该如何做好日常保养工作?建议在桁架机械手使用后的一个月内每天清洁过滤设备。正常使用一个月后定期清洁设备。您可以根据气源的质量设置时间表。气管,数控桁架机械手连接接头是否有泄漏,定期检查旋转接头附近的气管有无磨损、接头、老化等情况。我们建议您在使用设备后的一个月内每天检查设备的正常使用情况。使用一个月后,应每周检查一次。承重连接为确保安全,所有承重连接螺栓和焊接部位应每周仔细检查一次。如果松动或损坏,应立即重新拧紧或更换。
机械手分为桁架机械手、数控桁机械手,组成一般由执行系统、驱动系统和控制系统组成。而致动和驱动系统主要设计完成手臂的正常功能,机械部分由气动或电机驱动实现取物功能。随着机械手应用的逐渐深入,要求插片放置、产品胶口切割、装配简单。改善工作条件,防止人身事故。在高温、高压、低温、低压、多尘、嘈杂、有异味、有放射性或其他有毒污染、工作空间狭小等条件下,直接用手操作有风险或不可能,机械手可以代替部分或全部人完成操作,从而改善工作条件。在一些简单的、重复性的操作中,尤其是笨拙的操作,用机器人代替人可以防止因操作的疲惫或疏忽而造成的人身事故。可以减少人力,方便有节奏的生产。用机械手代替人做作业是直接减少人力的一面,减少人力的另一面是因为机械手可以连续工作。所以目前现役机床感应加工主动线上根本没有机械手,以减少人力,更有效的控制生产节奏,方便有节奏的生产。提高生产过程中的主动性。机械手的使用有利于完成数据传输、工件装卸、刀具更换和机器安装等工作。,进而可以提高劳动生产率,降低生产成本。2.浙江勃展工业自动化设备有限公司是一家专业提供机械手设备的公司,期待您的来电!

数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁架机械手的位置再现性时,在不同的速度和方向进行的迭代测试越多,位置再现性评估就越准确。位置再现性不受负载变化的影响。因此,位置再现性指标通常被用作示教/再现模式下机器人水平的重要指标。机器手的准确度取决于驱动和反馈装置的分辨率。重复精度比单次精度更重要,如果定位精度不够准确,通常会看到可预测的固定误差,可以通过编程进行修复。再现性定义了通过重复一定次数的运行确定的随机误差范围。来自实验室的一整套气动伺服技术和气动伺服定位系统,此外还开发了微电子技术和***的控制技术。控制柜是桁架机械手的另一个关键的组成部分,通俗来说控制柜就是桁架机械手的大脑。金华六轴机械手机器人
5.勃展机械手,智能灵活,工业自动化的得力助手。工业机械手直销
桁架机械手是数控车床自动上下料、卸料的自动化机械装置,其自动上下料基本工作原理是按照预先编写好的程序的指令,从料仓中将工件一个个抓取并移动到车床主轴上。工件卸入成品料仓,机械臂上附有一组转塔式双工位夹具,一组夹具负责上料,另一组夹具负责卸料。总之,机械手以自动装卸作业代替人工智能作业,从而提高效率,降低成本,增强企业竞争力。桁架机械手选型参数购买桁架机械手时,要了解桁架机械手的机械使用要求,如所实现的功能、负载重量、精度和夹持方式等,全部基于机器条件。工业机械手直销