杭州机床机械手机器人
桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。早期进口的机械手大都用他们自己制造的齿轮机构减速。杭州机床机械手机器人
桁架机械手爪机械自锁爪:这种结构很受客户欢迎。机械自锁爪的结构相对简单,但在抓取方面也做了复杂的设计。为了防止夹紧零件时脱落,增加了自锁装置。连杆杠杆爪:从名称上,我们可以将其与其结构联系起来。连杆杠杆爪采用机械连杆机构,通过连杆和杠杆的传动夹紧和释放爪,但该机构有一个缺点,即夹紧力相对较大。齿轮齿条式爪:这种机构具有好的传动性和**快的动作反应速度。它通过齿轮之间的传动控制爪子,可以实现速度的突破。温州数控机械手供应厂浙江勃展工业自动化设备有限公司为您提供 机械手设备,有想法可以来我司咨询!
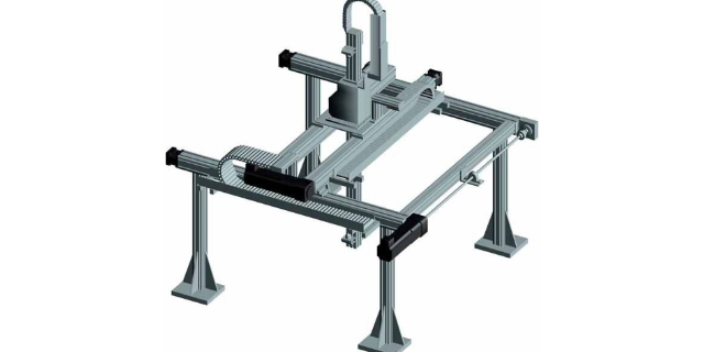
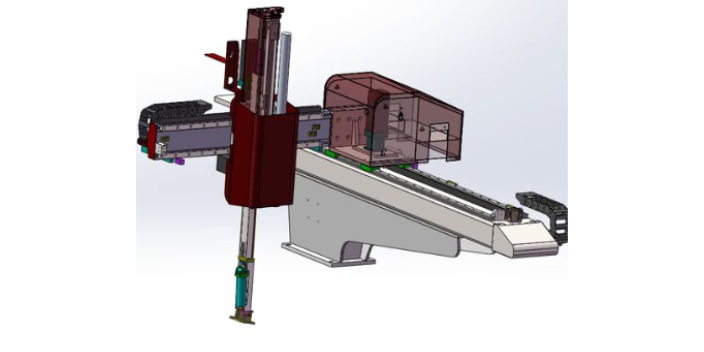
桁架机械手组成结构和原理。桁架机械手主要完成机床制造过程的全自动化,采用集成加工技术,适用于生产线上下料、工件旋转、工件排序等。数控桁架机械手由机体、驱动系统和控制系统三个基本部分组成。根据重型桁架机械手制造商的说法,机器人的结构将其分类为笛卡尔坐标系,机械手沿二维笛卡尔坐标系移动。主要部分通常采用龙门式结构,由Y向横梁和导轨、Z向滑枕、十字滑台、立柱、过渡连接板和底座组成,齿轮随Y向横梁和固定齿条转动。z方向的滑枕带动运动部件沿导轨快速运动。
桁架机械手的设计要点桁架机械手是自动化生产线的一个重要节点,不少自动化产线负责人找自动化上下料,自动码垛设备,桁架机械手就是一个不错的选择,下面亿思特和大家分享一下桁架机械手的设计要点:桁架机械手的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。桁架机械手各关节轴尽量相互平行,相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。桁架机械手结构框架主要由立柱等多种结构件构成。它的主要作用是把各部分的轴抬高到了一定高度。

桁架机械手焊接四大条件介绍。数控桁架机械手对整体尺寸精度没有特别高的要求。配备偏差检测和焊接过程电弧跟踪功能可进行一定程度的修正2、应控制角焊缝装配间隙。否则,焊缝很容易穿透。如果有缝隙,在机器人焊接前进行人工打底,可以有效减少焊透的发生。对接焊缝根部间隙应稳定均匀。现代焊接机器人通常具有间隙感应能力。在一定程度上可以根据焊缝的实际根部间隙进行参数修正,但如果间隙过于不均匀,变异性大,焊缝的熔合和焊缝成型质量也会很不稳定。应控制机械手焊缝余量。比如一个角焊缝应该是10,而实际板边焊缝余量只有8,肯定会咬边机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。衢州机床机械手厂家
桁架机械手改变了传统车间内的工作方式,改善了工作环境,提高了劳动生产力。杭州机床机械手机器人
机械手寿命有哪些影响因素?机械手是由人力和手动操作进***动辅助的机械手。使用气动助力机械手可以减少操作人员的工作量,在搬运大量工件时便于操作,便于准确定位,保证设备和操作人员的安全。气动助力机械手操作简单、使用安全、易于维护、灵活度高,适用于仓储行业和零件加工现场的物料运输、自动化生产线的装配定位等应用。这里。气动助力机械手虽然有比较完整的气动回路,降低了工件抓取、提升、旋转、技术等操作难度,减少了对设备的磨损和损坏,但是正确的操作人员数量是否会影响操作设备整体运行性能和设备寿命。以板式夹具为例,简要介绍人为操作对设备和工件的影响。杭州机床机械手机器人
上一篇: 衢州桁架机械手哪里有
下一篇: 浙江六轴机械手机器人