绍兴机械手设备
数控机床桁架机械手搭建自动化生产线,具有计算能力.决策规划.主动监管.预警.电子元件具有维护等功能,因此桁架机器人设备已被多台自动机床选用。装卸机械手带来高可靠性.工件加工效率高,灵敏度高。如果在操作过程中出现问题,应启动主动维护措施并发出警告。熟练人员能及时处理问题,减少事故发生的可能性,保证工人的人身安全。.数控车床自动上下料可以有效降低成本与传统的数控车床机械手动生产线相比,数控机床上下材料机械手可以以低能耗驱动机床完成加工过程,加工产品精度高,功率损失率低。节约电力资源,提高生产速度,确保产品质量。此外,随着软强度的进步,机床自动化系统更轻.工业消工业消费减少。机械手设备,选浙江勃展工业自动化设备有限公司,欢迎您的来电!绍兴机械手设备

机械手的形式特征有哪些?投球类型除了水**转外,这种运动伺服机械手还具有手臂俯仰活动。这两种活动和手臂的弹性运动组成了一个完整的俯仰伺服机械手。它的运动比例图是一个空心球体,它的运动函数是俯仰。俯仰伺服机械手尺寸和空间相同,可以延伸到地面,完成从地面提取工作的任务。缺点是动作不直观,结构混乱,手臂有两个相反的动作,手臂末端的位置误差随着手臂的伸展而增加。伺服机械手及屈伸臂它由上臂和前臂组成。伺服机械手液压机械手采用液压动力和电液伺服控制,具有工作灵活、负载刚性高等优点。适用于高精度、高速响应、高输出/大重量、高输出的货物运输。它的结构类似于人的上肢,具有较大的手臂伸展半径和提取高度灵活的球形工件的能力。金华关节机械手5.勃展机械手,智能灵活,工业自动化的得力助手。
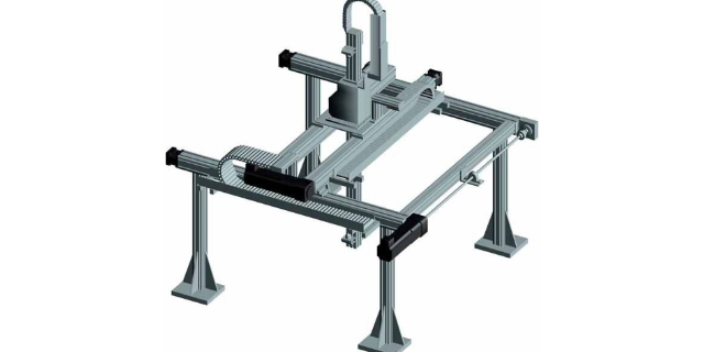
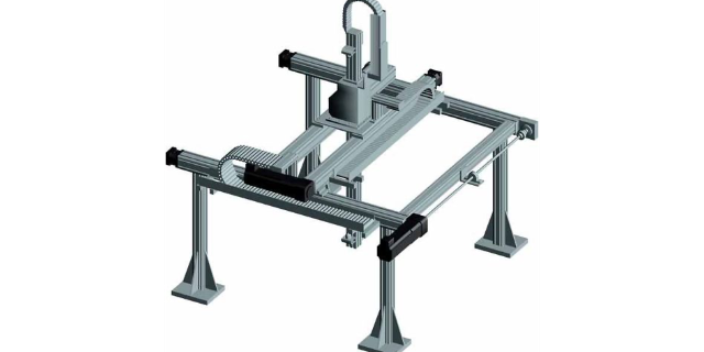
桁架机械手的控制**通过工业控制器(如:PLC,实现运动控制、单片机等。).通过控制器对各种输入(各种传感器、按钮等)的信号进行分析和处理。),在做出一定的逻辑判断后,向各输出元件(继电器、电机驱动器、指示灯等。)发出执行命令并完成X,Y,Z三轴之间的联合运动实现了一套完整的自动操作过程。在国内机械加工中,许多是使用**机器或人工机床,但随着社会的进步和发展,技术、产品升级、**机器和劳动力、面积大、灵活性不足、生存效率低等不能满足大规模生产的需要。
机械手虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械手已受到许多部门的重视,并越来越***地得到了应用。我国塑料机械已成为机械制造业发展快的行业之一,年需求量在不断的加大。我国塑料机械产业的高速发展主要有以下两个大因素∶一是对高技术含星装备的需求所带来的设备更新及陈日设备的淘汰;二是海内塑料加工产业的高速发展,对塑料机械的需求旺盛。灵活多用的机械手,助力企业降本增效。
数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁架机械手的位置再现性时,在不同的速度和方向进行的迭代测试越多,位置再现性评估就越准确。位置再现性不受负载变化的影响。因此,位置再现性指标通常被用作示教/再现模式下机器人水平的重要指标。机器手的准确度取决于驱动和反馈装置的分辨率。重复精度比单次精度更重要,如果定位精度不够准确,通常会看到可预测的固定误差,可以通过编程进行修复。再现性定义了通过重复一定次数的运行确定的随机误差范围。来自实验室的一整套气动伺服技术和气动伺服定位系统,此外还开发了微电子技术和***的控制技术。4.勃展机械手,自动化生产的好帮手,品质之选。宁波机械手哪家好
1.浙江勃展工业自动化设备有限公司致力于提供机械手设备,欢迎来电咨询!绍兴机械手设备
机械手臂的作用组成介绍。作用手臂一般有3个运动:伸缩、旋转和升降。实现旋转、升降运动是由横臂和产柱去完成。手臂的基本作用是将手爪移动到所需位置和承受爪抓取工件的z大重量,以及手臂本身的重量等。组成手臂由以下几部分组成:运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。导向装置。是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。绍兴机械手设备
上一篇: 金华机械手定制
下一篇: 舟山关节机械手机器人