宁波自动化机械手厂家
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。工业机器人连续六年成为大的应用市场,服务机器人需求潜力巨大。宁波自动化机械手厂家
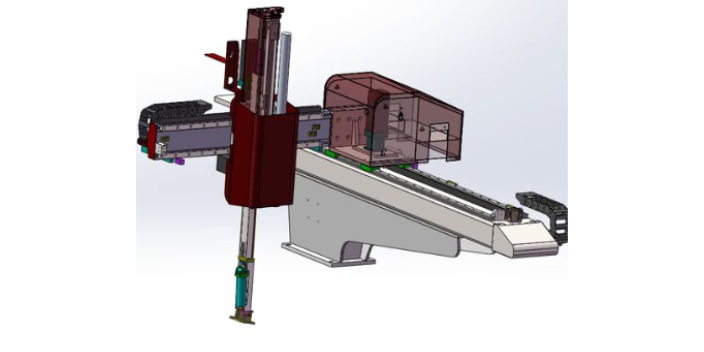
桁架机械手的控制**通过工业控制器(如:PLC,实现运动控制、单片机等。).通过控制器对各种输入(各种传感器、按钮等)的信号进行分析和处理。),在做出一定的逻辑判断后,向各输出元件(继电器、电机驱动器、指示灯等。)发出执行命令并完成X,Y,Z三轴之间的联合运动实现了一套完整的自动操作过程。在国内机械加工中,许多是使用**机器或人工机床,但随着社会的进步和发展,技术、产品升级、**机器和劳动力、面积大、灵活性不足、生存效率低等不能满足大规模生产的需要。宁波自动化机械手厂家机械手设备,选浙江勃展工业自动化设备有限公司,欢迎您的来电!

数控桁架机械手的日常保养,请注意以下几点:无论是在制造过程中,还是在数控桁架机械手的清洁保养过程中,都应注意避免使用纤维和短纤维。异物可能会进入数控车床的机械手连接处,影响性能或造成损坏。数控桁架机械手需要非常精密的设计结构,每一台都安装牢固,没有杂物,所以日常使用数控桁架机械手时要注意周围环境的清洁度。请勿让铁粉、灰尘等进入机械臂导轨。可能会导致导轨磨损、振动和噪音。数控桁架机械手开机时,注意不要给予强烈的冲击力或用重物撞击机械手的导轨。它会损坏数控车床机械手的内部或表面。它对机械手的运动精度产生不利影响。在使用数控桁架机械手时,操作人员在拿起设备前应将手上的汗水、污垢、油渍等成分清洗干净,而不是直接拿起,涂抹矿物油。这可以防止手的不良部件腐蚀桁架机械手。我们对细节的关注可以延长我们的机器手的使用寿命,并确保长期的稳定性和准确性。
桁架机械手焊接四大条件介绍。数控桁架机械手对整体尺寸精度没有特别高的要求。配备偏差检测和焊接过程电弧跟踪功能可进行一定程度的修正2、应控制角焊缝装配间隙。否则,焊缝很容易穿透。如果有缝隙,在机器人焊接前进行人工打底,可以有效减少焊透的发生。对接焊缝根部间隙应稳定均匀。现代焊接机器人通常具有间隙感应能力。在一定程度上可以根据焊缝的实际根部间隙进行参数修正,但如果间隙过于不均匀,变异性大,焊缝的熔合和焊缝成型质量也会很不稳定。应控制机械手焊缝余量。比如一个角焊缝应该是10,而实际板边焊缝余量只有8,肯定会咬边机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎您的来电!
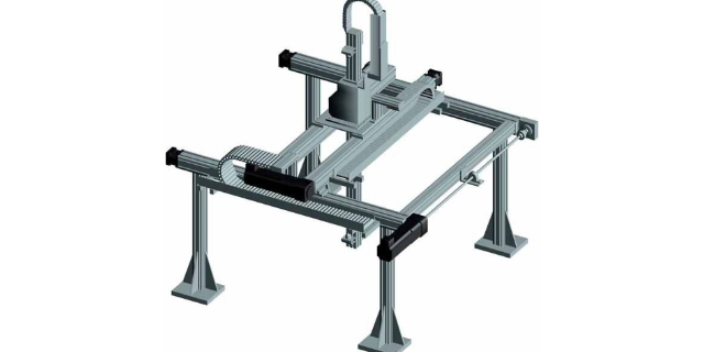
桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。浙江勃展工业自动化设备有限公司致力于提供机械手设备,期待您的光临!浙江六轴机械手供应
机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,有想法可以来我司咨询!宁波自动化机械手厂家
桁架机械手的使用日益***,单在使用过程中会遇到这样或者那样的问题,给企业造成一些不必要的损失,为了降低桁架机械手的故障率,接下来给大家分享一下桁架机械手在使用前后的注意事项。操作后的注意事项桁架机械手在完成工作操作后还需要注意做相关的检查维护工作。机械手在不工作的状态下或暂时停止时,要将制动开关恢复到原位,并且将机械手臂停止在空闲位置,以免机械手受外力的影响而牵动造成随意的旋转而使设备受损人员受伤。宁波自动化机械手厂家