杭州自动化机械手设备
机械手的形式特征有哪些?投球类型除了水**转外,这种运动伺服机械手还具有手臂俯仰活动。这两种活动和手臂的弹性运动组成了一个完整的俯仰伺服机械手。它的运动比例图是一个空心球体,它的运动函数是俯仰。俯仰伺服机械手尺寸和空间相同,可以延伸到地面,完成从地面提取工作的任务。缺点是动作不直观,结构混乱,手臂有两个相反的动作,手臂末端的位置误差随着手臂的伸展而增加。伺服机械手及屈伸臂它由上臂和前臂组成。伺服机械手液压机械手采用液压动力和电液伺服控制,具有工作灵活、负载刚性高等优点。适用于高精度、高速响应、高输出/大重量、高输出的货物运输。它的结构类似于人的上肢,具有较大的手臂伸展半径和提取高度灵活的球形工件的能力。3.机械手设备,就选浙江勃展工业自动化设备有限公司,欢迎致电!杭州自动化机械手设备

桁架机械手自动化给企业带来利益跟着工业的自动化越来越遍及,没有发展机器自动化的企业就失去了在市场竞争的条件,一起也由于现在工厂出产化需求投入的本钱太高,如果功率得不到提高则无法弥补过多本钱造成的企业下坡路。**逐渐可控的条件下,许多金属加工职业的老板们常常为手上有订单可是没有工人,交不出货而***。因而现在越来越多的工厂开始运用桁架机械手,那么运用桁架机械手会带给企业什么利益呢?跟随工业4.0的步伐,我们超睿在自动化方面也早已深化其间,从单机淅架机械手到多联机柘架机械手,一台机床加一台机械手完结工件自动上下料,加工,到自动化单元/出产线,也可以由多台机床与机械手配合加工出产。湖州数控机械手机器人机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎您的来电!
桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。
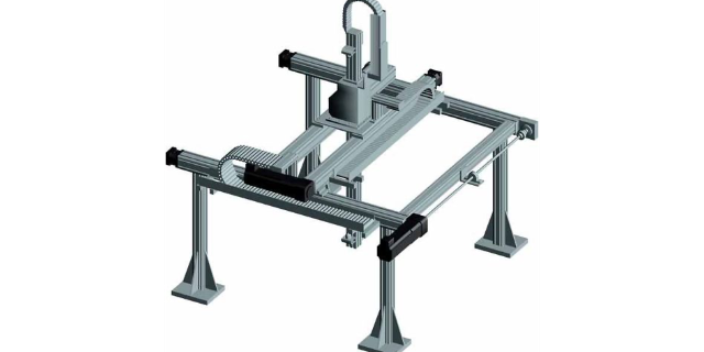
数控桁架机械手由多维直线导轨组合成。直线导轨由高精密工业铝型材、齿带、直线导轨和电机组合成。高精密工业铝型材的横截面形状用作运动框架和载体,通过有限元的分析优化,出色的生产效率确保了其强度和直线性。轴承光杆和直线滑动导轨用作运动导轨。运动传动机构采用齿带、齿条或滚珠丝杠。数控机床桁架机械手,单台普通**的机床越来越多的被功能强大、标准化机床和灵活的自动化生产线所取代。例如,在装卸数控机床、数控机床、垂直数控加工中心、水平数控加工中心、数控垂直车床、数控磨床、数控齿轮磨床等时,空白重量可以是几公斤,也可以是几百公斤,小部件通常是大型电机外壳、发动机外壳、减速器外壳装卸、搬运费时费力,直接关系生产效率、机床利用率和生产安全。早期进口的机械手大都用他们自己制造的齿轮机构减速。

机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。桁架机械手可以完成各种复杂的操作,如搬运、装配、加工等,适用于各种工业生产领域。杭州自动化机械手设备
模块化机械手设计,快速适应多样化工件搬运。杭州自动化机械手设备
机械手有什么特点呢?原材料多样化第1大类是机械制造业包括机械加工、轻工机械等以金属材料作为加工的原料,如钟表、缝纫机、自行车和家用电器等耐用消费品的加工。第二大类是以农、林、牧、副及化工产品等非金属材料作为加工的原料,如食品机械中的糕点机械以农产品为主要原料;罐头、酿造机械以农、副产品为主要加工原料;制浆造纸机械以林产品和农副产品为原材料;皮革机械以畜牧产品为主要原料;陶瓷、玻璃、塑料机械则以矿物、化工产品为其原料。其表明自动化机械手及自动生产线应用领域***杭州自动化机械手设备
上一篇: 机床机械手哪里有
下一篇: 绍兴自动化机械手直销