金山区重型桁架机械手
助力机械手主机本体:助力机械手主机本体根据结构形式分为软索式和硬臂式 2 大类。软索式助力机械手通常与滑动轨道配合使用,它的特点是服务范围较大、与其他助力机械手相比,使用更轻便灵活,缺点是在助力机械手和工件之间有障碍物时不便于使用,以及对工人的操作熟练程度要求高一点(想想大家刚开始学骑自行车时的感觉)。**夹具:是整个助力机械手系统中****的部分之一,整个系统是否好用也主要由夹具设计的好坏决定,它完全是根据客户使用的工艺要求和工件状态而专门定制的,因此它是一种非标设计,平时我们工程师的主要工作也集中在这一部分,浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有需要可以联系我司哦!金山区重型桁架机械手

桁架机械手结构的刚性:桁架机械手设计中的结构强度及刚性比较低会产生振动,从而造成定位精度较低;运动重量:包括机械手本身及抓取工件的重量,在桁架机械手的设计中一般会根据工件的重量来决定机械手刚性,当我拉抓取的工件重量越重时产生的惯量也就越大,所以在运动件重量增加时,定位精度会降低;控制及定位方式对精度的影响:定位方式采用挡块定位时,定位精度就会与挡块的强度及桁架机械手的运行速度有关,伺服电机定位大于挡块定位;控制采用采用液压及气压控制时,由于受气温影响气压液压会有波动,因些采用伺服控制的稳定性大于气动及液压控制;绍兴国产桁架机械手排名桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,期待您的光临!
桁架机械手是能够实现自动控制、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。具体所含有的特点有:可以在一些比较恶劣的环境中进行长期的工作。运行过程中,有着非常高的可靠性、速度以及精度性。可以根据用户所配套的操作工具不同,自身所携带来的功能也将会是不同。以上所述的三点,便是属于日常生活中市场上常见桁架机械手所含有的特点。桁架机械手的三大部件究竟是什么样子的。下面就请大家一起来看看吧!手部:桁架机械手的这个部位,往往是采用了丝杆螺母的结构。腕部:桁架机械手这个部位,则是采用了一个步进电机来带动涡轮杆。臂部:设备的这个部位,则是次用了滚珠丝杆来进行工作。以上所述的三点,便是属于在桁架机械手上的三部件样貌。
桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。然而现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命,因此急需一种新型的桁架机械手来解决现有问题。技术实现要素:要解决的技术问题为了克服现有技术不足,现提出桁架机械手,解决了现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命的问题。技术方案本实用新型通过如下技术方案实现:本实用新型提出了桁架机械手,包括传动架、轴承固定座以及直线导轨一,所述传动架上端一侧通过螺栓连接有输入马达,所述输入马达的传动输出端通过螺栓连接有减速机,所述减速机的传动输出端通过键连接有齿轮。 桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有需要可以联系我司哦!

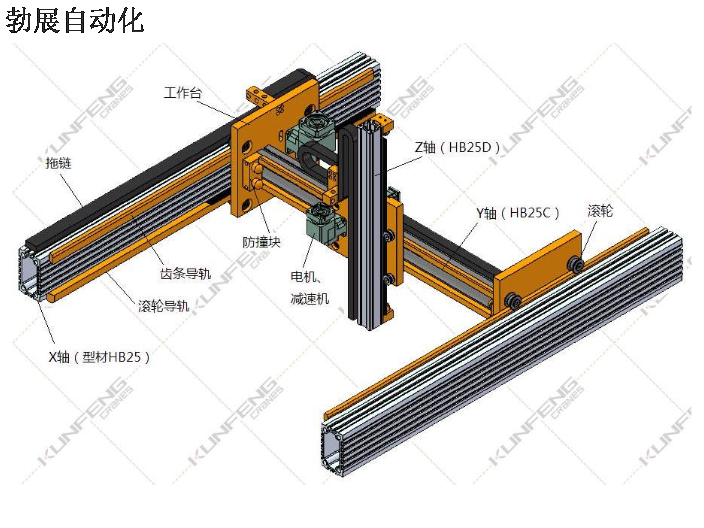
桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。机器人根据其结构分为笛卡尔坐标系,机械手沿二维笛卡尔坐标系运动。主体部分通常采用龙门结构,由Y方向横梁及导轨、Z方向闸板、十字滑座、立柱、过渡连接板、底座等组成。Z方向直线运动为交流伺服电机,通过蜗轮减速器带动齿轮滚动,齿条固定在Y方向横梁和Z方向滑枕上,带动运动部件沿导轨快速移动。运动部件为轻型十字滑动座和Z向闸板,闸板采用铝合金型材。横梁采用方钢型材,导轨和机架安装在横梁上,通过滚轮与导轨接触,整个机械手悬挂在横梁上。浙江勃展工业自动化设备有限公司为您提供 桁架机械手设备,有想法的不要错过哦!金山区重型桁架机械手
浙江勃展工业自动化设备有限公司桁架机械手设备值得用户放心。金山区重型桁架机械手
桁架机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手抓住工件后,使Z轴再向上运动到指定高度,再沿X轴方向运动到工作台卡盘正上方、Z轴向下运动把工件装入到卡盘或工装内、卡盘夹紧、Z轴上升到超出机床防护罩上方、X轴再运动到等待位置等待机床完成工件的加工。桁架机械手下料过程的工作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。以上工作安排的路径需要与桁架机械手配套的上下料机构如料盘、卡盘等的位置在同一条直线上,这样才能满足机械臂做X-Z两维运动的要求。如果实际情况较难满足,可以为机械臂再增加一个Y轴,这样数控机械臂就可以进行X-Y-Z三轴三维运动了,灵活度可以**增强。金山区重型桁架机械手