无锡桁架机械手设计资料
助力机械手结构及组成介绍,移动及滑行部分:为使助力机械手具有更大的服务范围,助力机械手本体通常装在滑动轨道或平台小车上,以便于在不同的位置取置工件。通常滑动轨道的布置都采用井字形布置,其中2根固定吊挂在基础上,另1根上活动的,助力机械手悬挂在活动轨道下。活动轨道和助力机械手的移动,通常都有是由人力拉动,2根固定轨道的长度无特别的限制,活动轨道在设计时应考虑越短越好,基于轨道定长和移动便利的考虑。活动轨道**长不应超过6M。平台小车有地面行走和空中吊挂行走2种形式。地面行走的平台小车安装了脚轮和支撑脚,依靠人力移动,移动过程中不允许吊挂工件,移动到操作位置后,须放下支撑脚才能进行操作。空中吊挂行走有人力行走和电动行走,在行走时不影响助力机械手的自身操作。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,欢迎客户来电!无锡桁架机械手设计资料

桁架机器人应用领域:多自由度运动,每个运动自由度之间的空间夹角为直角。自动控制的,可重复编程的,一切的运动均按程序运行。3灵活,多功用,因操作工具的不同功用也不同。高可靠性、高速度、高精度。可用于恶劣的环境,可长期工作,便于操作维修。各个机器行走轴,均可选用直线导轨,具有可高速运行,安装调试便利,适合长行程的长处。桁架机器人设备装备:框架结构:铝型材设备基础。运动组织:导轨,直线轴,伺服电机,丝杠。治具(机器手):定制。常州桁架机械手 河北浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,欢迎新老客户来电!
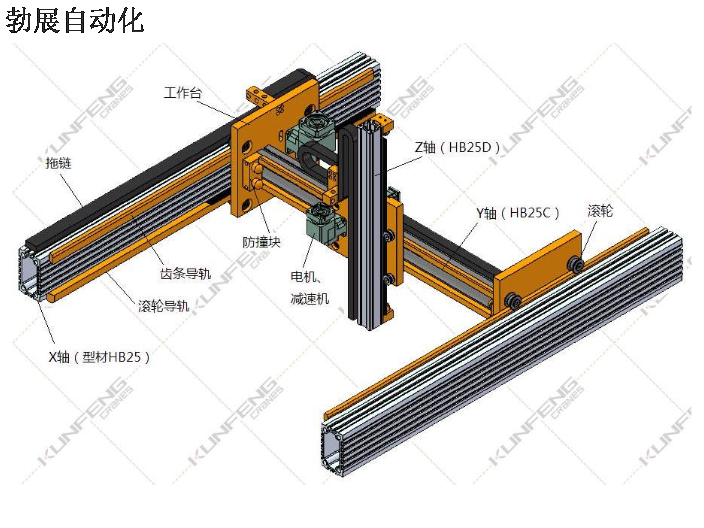
桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。机器人根据其结构分为笛卡尔坐标系,机械手沿二维笛卡尔坐标系运动。主体部分通常采用龙门结构,由Y方向横梁及导轨、Z方向闸板、十字滑座、立柱、过渡连接板、底座等组成。Z方向直线运动为交流伺服电机,通过蜗轮减速器带动齿轮滚动,齿条固定在Y方向横梁和Z方向滑枕上,带动运动部件沿导轨快速移动。运动部件为轻型十字滑动座和Z向闸板,闸板采用铝合金型材。横梁采用方钢型材,导轨和机架安装在横梁上,通过滚轮与导轨接触,整个机械手悬挂在横梁上。
气动助力机械手设计需要注意什么?助力机械手的杠杆率为1:5、1:6、1:7.5和1:10,其中1:6的杠杆率为标准规格。如果增加杠杆率,工作范围可以扩大,但较大增加应相应减少。在铸造、锻造等灰尘较多的厂房使用时,应对旋转减速箱进行良好的密封,否则会影响其使用寿命。平衡臂旋转部分的轴承应用黄油密封。小横臂要有足够的刚度。如果平衡臂满负载上升,小横臂因刚度不足而变形,会影响负载时平衡区的变化。大横臂、小横臂、起重臂、支撑臂等零件的孔距应保证附着杠杆率,否则也会影响空载时平衡区域的变化。旋转减速箱的旋转座上两个轴承之间的距离不应太小,否则会对机械手的旋转部分造成颠覆。安装固定气动助力机械手时,必须先调整水平导向槽的水平度,不水平度不得超过0.025/100毫米。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎您的来电!

桁架机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手抓住工件后,使Z轴再向上运动到指定高度,再沿X轴方向运动到工作台卡盘正上方、Z轴向下运动把工件装入到卡盘或工装内、卡盘夹紧、Z轴上升到超出机床防护罩上方、X轴再运动到等待位置等待机床完成工件的加工。桁架机械手下料过程的工作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。以上工作安排的路径需要与桁架机械手配套的上下料机构如料盘、卡盘等的位置在同一条直线上,这样才能满足机械臂做X-Z两维运动的要求。如果实际情况较难满足,可以为机械臂再增加一个Y轴,这样数控机械臂就可以进行X-Y-Z三轴三维运动了,灵活度可以**增强。浙江勃展工业自动化设备有限公司为您提供 桁架机械手设备,期待您的光临!常州桁架机械手 河北
桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有需要可以联系我司哦!无锡桁架机械手设计资料
桁架机械手按连机的方法分成单机版桁架机械手、双连机桁架机械手、多联机桁架机械手自动生产线等几类形式;桁架机械手按负载货量又分成轻型桁架机械手、中重型桁架机械手这二种形式。对于采用哪样桁架机械手形式,要依据商品的加工工艺和生产時间、商品的外形和总重量及其客户的具体必须来确定。桁架机械手的优点:桁架机械手布局于数控机床的侧建筑立面,占有室内空间小,有利于数控机床的换刀、调节,维护保养等实际操作。此外桁架机械手工程造价较低,具备高性价比的优势。无锡桁架机械手设计资料
上一篇: 四川品牌桁架机械手
下一篇: 河南自动化机器人哪家好