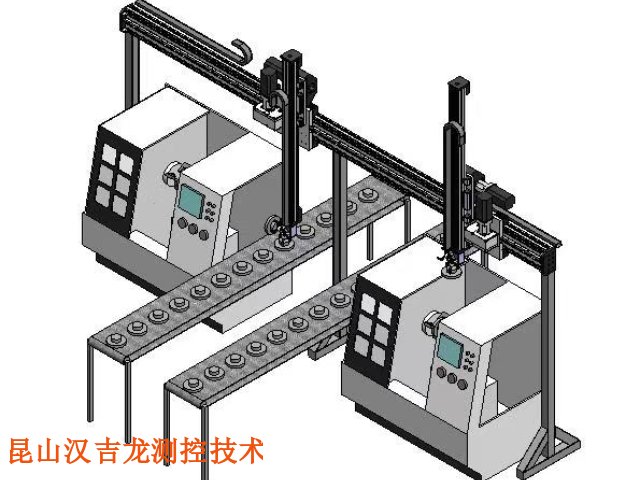
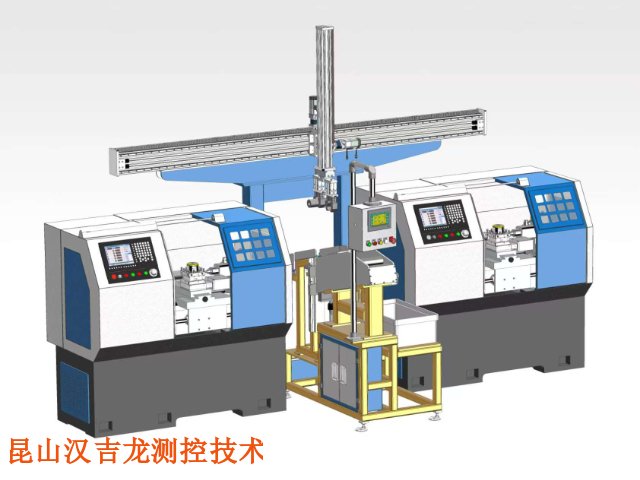
预测性自动化智能机器人实验台加工
自动化智能机器人实验台智能感知与决策多种传感器融合:集成了多种类型的传感器,如视觉传感器、激光雷达、超声波传感器等,通过传感器融合技术,使机器人能够更***、准确地感知周围环境,为智能决策提供丰富的数据支持。智能算法应用:支持各种智能算法,如深度学习、强化学习等,使机器人能够根据感知到的环境信息进行自主学习和决策,实现更复杂的任务和行为,如自主避障、路径规划等。可扩展性硬件扩展:具备良好的硬件扩展性,预留了多个接口和插槽,方便研究人员根据实验需求灵活添加或更换硬件模块,如增加新的传感器、扩展电机驱动能力等,以满足不同实验场景和任务的要求。软件升级:软件系统具有开放性和可升级性,研究人员可以方便地对程序、算法模型等进行更新和优化,不断提升机器人的性能和功能,适应不断发展的机器人技术需求。安全可靠性安全防护机制:设计了完善的安全防护措施,如紧急停止按钮、安全围栏、碰撞检测传感器等,能够在机器人出现异常情况或可能发生危险时及时停止运行,保护实验人员和设备的安全。稳定性设计:在硬件选型和系统设计上充分考虑了稳定性因素,采用***的元器件和可靠的电路设计,经过严格的测试和验证。自动化智能机器人实验台能耗大吗?预测性自动化智能机器人实验台加工
自动化智能机器人实验台可使用的数据分析算法种类繁多,以下是一些常见的算法:数据预处理算法归一化算法:该算法将数据映射到特定的区间,如将数据归一化到[0,1]或[-1,1]区间,不同特征之间在量纲和取值范围上的差异,使数据具有可比性,提升后续算法的准确性和稳定性。例如,机器人的传感器数据中,距离数据可能在0-10米范围,而温度数据可能在0-100摄氏度范围,通过归一化可将它们统一到相同的尺度。滤波算法:包括均值滤波、中值滤波、卡尔曼滤波等。均值滤波和中值滤波可去除数据中的噪声,前者取一定窗口内数据的平均值来平滑数据,后者取窗口内数据的中值来脉冲噪声。卡尔曼滤波则用于处理具有动态特性的数据,能在噪声环境下对机器人的状态进行比较好估计,如在机器人中,结合传感器测量值和运动模型,准确估计机器人的位置和速度。机电一体化自动化智能机器人实验台视频智能机器人实验台有独具匠心吗?

自动化智能机器人实验台数据挖掘与预测算法关联规则挖掘算法:如Apriori算法,用于发现数据集中不同变量之间的关联关系。在机器人实验数据中,可挖掘出机器人的某些操作行为与特定环境因素或其他系统状态之间的关联,例如发现当环境温度较高时,机器人的某个部件更容易出现故障,为故障维护提供依据。时间序列预测算法:包括ARIMA模型、LSTM神经网络等。ARIMA模型基于时间序列的自相关性和差分特性进行预测,可用于预测机器人的某些性能指标随时间的变化趋势,如预测机器人的电池电量消耗趋势。LSTM神经网络则能更好地处理长期序列中的依赖关系,在机器人的运动预测、故障预测等方面有广泛应用,如预测机器人在未来几个时间步的运动状态。
hojolo 结合分析目的故障诊断:要检测机器人是否存在故障及确定故障位置,可选择基于规则的诊断算法、故障树分析法,也可采用神经网络诊断算法、支持向量机等有监督学习算法,通过训练故障样本数据来实现准确诊断。性能评估:评估机器人的运动精度、性能等,可使用均方误差(MSE)、峰值信噪比(PSNR)、平均***误差(MAE)等算法来计算实际输出与预期输出的差异。预测任务:预测机器人的未来状态、故障趋势等,时间序列预测算法如ARIMA、LSTM比较合适。若要预测机器人在不同环境下的行为表现,可使用基于强化学习的预测算法。考虑计算资源与时间成本计算资源:如果实验台的硬件配置较低,计算能力有限,应选择复杂度较低、对计算资源需求小的算法,如简单的统计分析算法、基于规则的算法。若实验台具备强大的计算能力,有高性能的CPU、GPU集群等,那么可以考虑深度学习等计算复杂度高但性能强大的算法。时间要求:对于实时性要求高的任务,如机器人在实时运行过程中的故障检测和预警,需要选择计算速度快、响应及时的算法,像基于规则的迅速判断算法。对于非实时性的数据分析任务,如对机器人长期运行数据的性能评估和优化,可以选择一些计算时间较长但精度更高的算法。 自动化智能机器人实验台很好。
电气部分连接检查:定期检查实验台的电源插头、插座、电缆等连接部位是否牢固,有无破损、老化或松动现象。若发现问题,应及时更换或修复,以防止电气故障和安全。电气元件:观察电气元件,如电机、操控器、驱动器、传感器等是否有发热、异味、异响等异常现象。定期清洁电气操控柜内部,确保无灰尘、杂物,保持散热良好,检查散热风扇是否正常工作,通风口是否堵塞。电源系统:确保电源供应稳定,电压和电流在设备要求的范围内。使用电压表和电流表等工具定期检测电源参数,防止过载或短路现象的发生。操控系统软件更新:及时更新实验台的操控系统软件、驱动程序等,以获取更好的性能、稳定性和新功能,修复已知的漏洞和问题。同时,定期备份重要的软件程序和数据,以防丢失或损坏。参数校准:根据实验需求和设备运行情况,适时对实验台的操控参数进行调整和校准,如机器人的运动速度、加速度、位置精度等,确保设备能够准确地执行任务。系统检查:检查操控系统是否稳定,有无故障报警信息。定期对操控系统进行功能测试,确保各个模块和功能都能正常工作。 智能机器人靠实验台能蜕变吗?机电一体化自动化智能机器人实验台
自动化智能机器人实验台的售后服务好不好呢?预测性自动化智能机器人实验台加工
自动化智能机器人实验台参考算法性能与可解释性算法性能:通过在实验台上进行算法测试,比较不同算法在准确性、精度、召回率等指标上的表现。例如在故障诊断任务中,对比神经网络算法和支持向量机算法的故障识别准确率和误报率,选择性能更优的算法。可解释性:在一些对解释性要求较高的场景,如工业生产中的关键机器人系统,需要选择可解释性强的算法,如基于规则的算法、决策树算法,以便工程师理解和解释算法的决策过程,迅速问题和进行系统优化。而对于一些对可解释性要求不高,只追求性能的场景,如某些智能安防机器人的图像识别任务,深度学习算法虽然可解释性差,但性能优越,也可被选用。结合过往经验与行业标准经验借鉴:参考相关领域的研究成果和实践经验,了解其他类似机器人实验台所采用的数据分析算法。比如在物流机器人领域,若已有成功案例采用了某种特定算法进行路径规划和优化,可考虑借鉴并根据自身实验台特点进行改进。行业标准:某些行业对机器人的数据分析有特定的标准和规范要求,例如汽车制造行业中机器人的质量检测和,需要遵循相关的行业标准和规范,选择符合标准的算法进行数据分析,确保机器人的性能和质量符合行业要求。 预测性自动化智能机器人实验台加工
上一篇: 产线工业4.0智能制造实训系统哪家好
下一篇: 智能化运动控制实训平台视频